Research
Projects
Projects
해양 수색 및 구조를 위한 최적의 자원 운용 모델 개발
선박해양플랜트연구소 (2024.01~2024.12)
개요
해양 수색 및 구조 (Maritime Search and Rescue)를 위한 UAV (Unmanned Aerial Vehicle)의 최적 수색 경로 생성 모델 개발
세부 내용
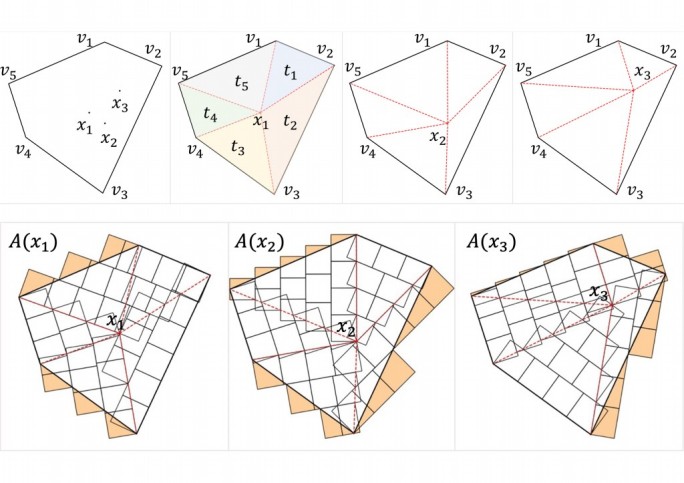
수색 경로 생성 모델은 ① Search area decomposition과 ② Coverage path planning으로 구성된다.
1. Search area decomposition: Particle Swarm Optimization (PSO) 기반의 알고리즘을 통하여 수색 영역을 초과하는 그리드 맵의 영역을 최소화하는 그리드 맵 생성
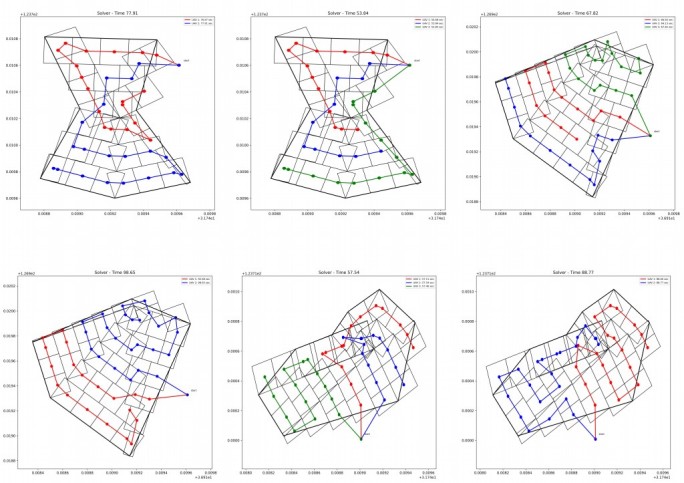
2. Coverage path planning: 수색 미션을 완수하는 시간을 최소화하는 혼합정수계획법 기반의 수색 경로 생성 모델 개발
Driving Innovation with Optimization, Data Analytics, and AI/ML.
Join COIS Lab to Solve Industrial Challenges and Grow with Us!
Tel.
041-550-3572
E-mail.
cois.dankook@gmail.com
Copyright © 2024 COIS. All Rights Reserved.